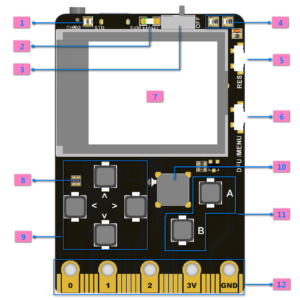
Meowbit是一款卡片大小的图形复古游戏计算机,允许您使用Makecode-Arcade和Python进行编码换句话说,它可以将游戏编程与硬件设备结合使用。
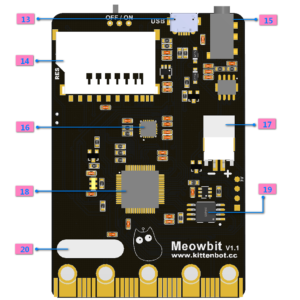
Meowbit是一款面向青少年的卡片大小的grahical编程视频游戏机它包含1.8英寸全彩屏幕、6个可编程按钮、1个蜂鸣器、内置光传感器、温度传感器、SD卡插槽(用于扩展存储)、多层连接器和边缘连接器特别是边缘连接器可以访问大多数微:位扩展板。我们建议使用Robot:bit for Meowbit,它可以帮助您快速创建机器人。
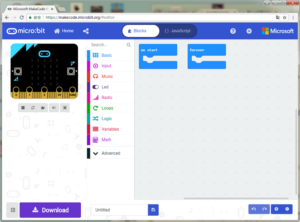
Makecode Arcade 图形界面编程模式
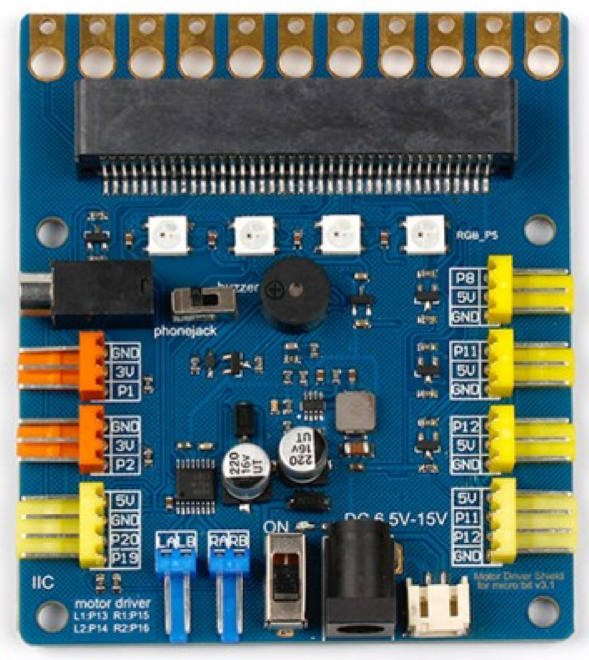
它有强大的能力驱动直流电机、步进电机、伺服、车载蜂鸣器和rgb像素,并从Microbit释放所有有效的I/O,支持市场上最常见的电子模块。它配有18650电池座、集成锂电池升压、充电和保护芯片。支持外部电源输入为Kittenbot机器人底盘和乐高技术插槽提供机械支持。强大的驱动能力和内置电池使DIY更加方便和自由。我们得到了学校教师培训机构和个人爱好者的一致好评它是基于Micro:bit的机器人项目的绝佳选择!
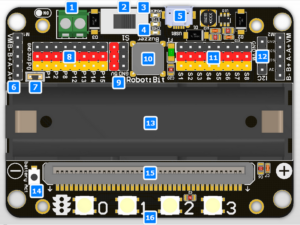
Robotbit 是专为小学生/培训机构/家长/爱好者设计的机器人配件。
Robotbit是一款优秀的机器人扩展板,由Kittenbot团队专门为Microbit设计。还包括一个3D打印保护套。
Robotbit V2.1 X 1
可用编码平台:Kittenblock(based on Scratch3.0) or Makecode and python(Mu editor in microbit mode)
MakeCode – 微软
KittenBlock (Developed by Kittenbot Team based on Scratch 3.0
Python
If you’re used to code programming and want to get started by microbit python you have two options, directly Mu Editoror kittenblock in micropython editor mode.


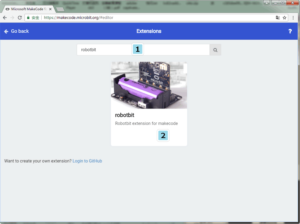
在makecode中添加扩展面板直接搜索Robotbit在makecode的脱机版本中,您可能会在默认列表和其他有用的扩展中找到robotbit。

18650 Battery Case
Once you got your RobotBit extension board please first install a 18650 battery, pay attention to the positive and negative pole (even we have anti-reverse protection). You have to activate the power management system by pressing the Battery Act push button. Each time you switch a battery cell or let the power management go into protection mode (over current or over discharge), you have to redo this step.
18650 Power Switch
Turn on the switch (in the direction of green terminal input), will provide onboard 3.3V 5V and VM(motors and servos directly driver by battery cell)
Micro USB charger port
![]()
Only for charging and not for download! Computer USB host port or any other mobile phone charger which may output 1A or larger should be fine and may take about 2.5 hours to fully charge a 18650 cell. it will automatically cut off once full, no need to worry about overshoot.
Power and battery indicator
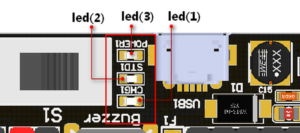
Led(3) is the power indicator, will be always on after switch is turned on. Led(1) is charging indicator, will be on while charing and Led(2) be on once fully charged.
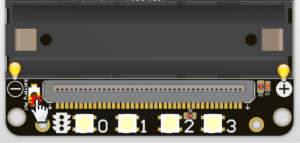
Micro:bit stand edge connector
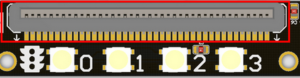
For installing Microbit mainboard. Please install Microbit with led matrix and RGB led in the same direction.
4x RGB neopixel
![]()
The robotbit extension for makecode has integrated neopixel support. Neopixel array connect to P16 of microbit.
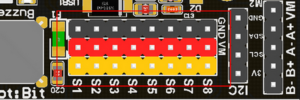
8 channel servo connector

Servos are driven by an extension chip (PCA9685) with the power source from battery or external input.The extension chip communicates with Microbit via the i2c interface, so these S1~S8 interfaces can only be used for pulse output not as common IO. With onboard 18650 battery cell, it may drive eight 9g hobby servo (with maximum current less than 2A). If you plan to use larger servos like MG995 please use an external power resource connect to the green slot (the input still 5V). Robotbit extension has built-in blocks for controlling servos.
4 channel DC motors / 2 channel 28BYJ micro steppers
Robotbit extension has also built-in blocks for DC motors and steppers. With onboard cell you may drive 4x TT motors or 2x 28BYJ steppers, or a mixture of theese. Keep in mind that VM may out 2A to motors and servos. If you use external source please keep the input around 5V or less, a high voltage external input may damage the 5V boost circuit.
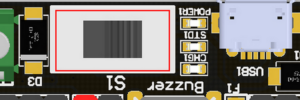
Buzzer and the selection jumper

The buzzer jumper cap is plugged in by default, and the corresponding buzzer is connected to the Micro:bit P0 port. If you need P0 for other purposes please unplug the jumper. The buzzer associate to music blocks in makecode.
Micro:bit IO

We have released P0-P2、P8、P12-P15 from Microbit to Robotbit for common IO usage. P0~P2 has analog read/write support, others may act as digital IOs. You may connect commonly modules for Arduino to Robotbit, there is also 5V output in case your module only support 5V power input. Please note that Microbit IO signal level is 3.3V.
I2C Interface

Expandable I2C module, can only be used to plug in I2C module.
2PIN External Power Input

Although there is anti-reverse protection, but still pay attention while wiring. The positive and negative silkink of this interface is on the back of Robotbit. You can only input 5V or less into this port. If you have a higher voltage source you may need a LDO or DC-DC module to buck the voltage down.
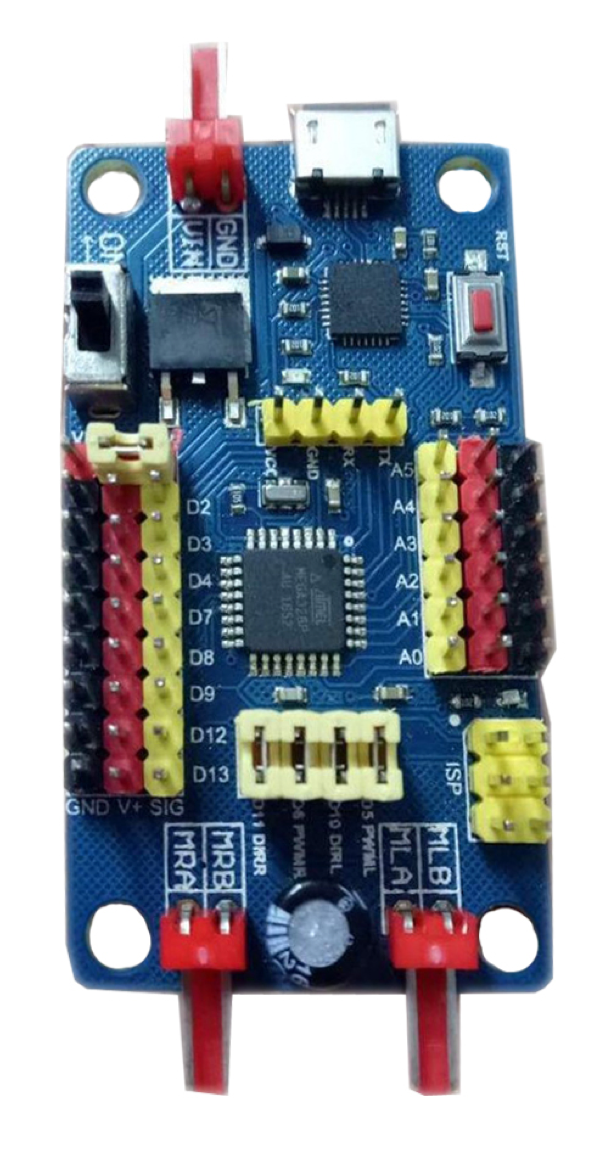
IObit,IO是指(输入、输出),IObit从名称上看主要是作为pin输出它适合一些希望使用所有IO端口的DIY爱好者。
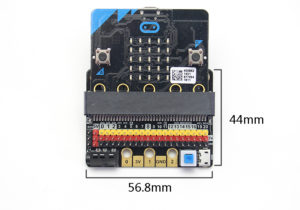
这是一种低成本的micro:bit扩展板,专门用于micro:bit的io端口。它占用了micro:bit上的所有io资源,并且在板上有一个蜂鸣器。它通过跳线帽连接到P0引脚。使用跳线帽可以释放P0引脚。小尺寸非常适合使用micro:bit的小型项目。
IObit 2.0 X1
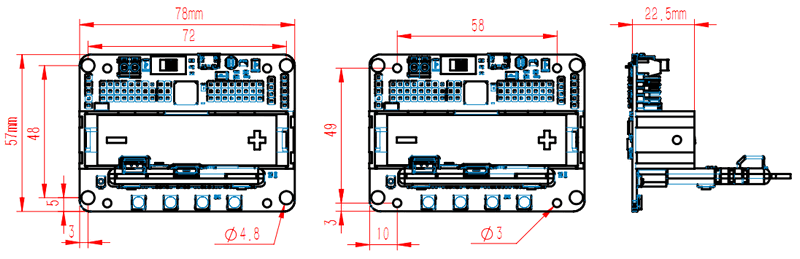
Length x width x height: 57mmx44mmx12mm
Technical Parameters
MakeCode/KittenBlock (based on Scratch3.0) with hardware: Micro:bit.
It is consistent with Micro:bit programming, because IObit does not have its own drive chip (except buzzer). The building block that is generally used with IObit is to operate the IO port. Many sensors on the market return a high and low voltage. Flat, or an analog value. For actuators, the microbit needs to output high and low level to control. People who are not familiar with this aspect can search Netease Cloud Classroom: Xiaoyan Technology and find the arduino tutorial, which explains how to use the commonly used sensors on the market, the principle is the same.
Before using the building blocks, you must first understand the control method or reading method of the electronic module you are using.
Most newbies will fall out of here because they often ignore setup pull-ups or pull-downs during initialization. So the level state will fail after reading it once. Therefore, we must pay attention to this. Micro:bit itself does not help to set up and down by default, you need to set it yourself.

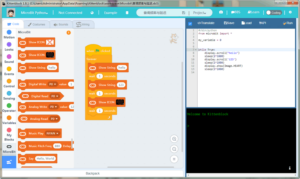
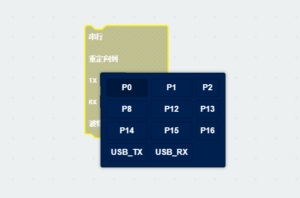
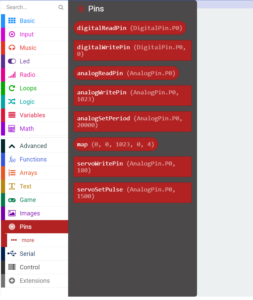
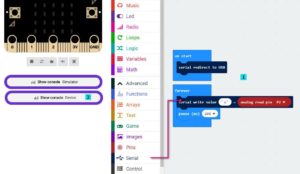
In response to the analog reading, because the analog reading will return a value of 0-1023, it is always inconvenient to display it with a dot matrix screen. So here we take advantage of the unique serial port debugging function of the MakeCode offline version produced by Xiaoyan. First, download the program shown in the figure to open the serial port. In step 2, the console of the device will appear, you can see the data returned in real time.
Digital read here does not need to set up and down

Simulated writing an example of a flashing light

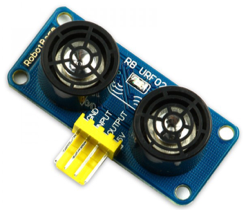
The most commonly used IO port operation is one of these four types. After you master it, you should have no problem with the commonly used sensors on the market. Another thing to note is that the sensors on the market are 5v and 3.3V compatible. But some can only work in 5V. For example, the blue ultrasonic wave that Taobao sells can ordinarily only work in 5V. If IObit is connected, the number read back will always be 0, because the module is not working properly!

Insert the USB power supply (5V 1A) as shown in Figure 1. Press the blue button at 2, and the red indicator light at 3 will light up. You can use the left 5V interface.
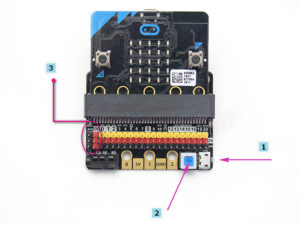
Toggle switch to turn off the buzzer function (see the silk screen on the back of the board for status)
3Pin IO port leads
All the pins in the Micro:bit have been taken out without any reservation (Note: there are no P17 and P18 on the Micro:bit, it’s not that the IObit is not taken out)
Yellow corresponds to the different IO pins
Red corresponds to 3.3V/5V (with silkscreen)
Black corresponds to GND
5PIN gold fingers
The gold fingers of the Micro:bit are used to draw 3v, gnd, P1, P2, and P3 respectively. This is for users who prefer to use alligator clips
Compact size socket
The two outermost holes are approximately 4.8 mm in diameter and are compatible with Lego friction pins with a spacing of 48 mm.
You can plug in a 3.5mm jack audio device and play the sound of the P0 pin.
If you haven’t gotten started with Micro:bit, first get started with Micro:bit, this is the operating premise.
Use music blocks directly in MakeCode to

If you use P0, remember to turn the buzzer toggle switch off (because the buzzer is combined with P0)


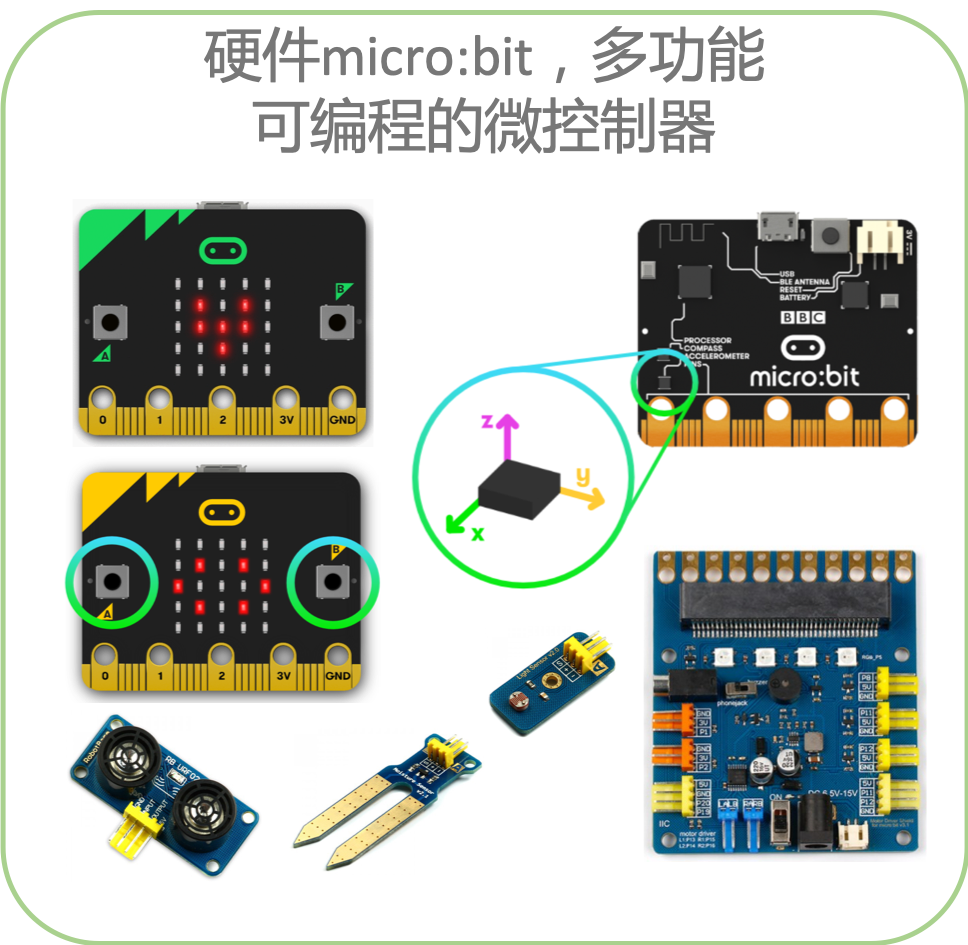
Micro:bit 是一款手持式,完全可编程的微控制器 ,具有许多内置功能:
S4A Arduino是一款手持式,完全可编程的微控制器 ,具有许多内置功能。
这扩张版有容易使用的预焊接引脚连接器,它专为学生设计,以方便先前很少或没有编程和微控制器培训。
扩张版内置功能:
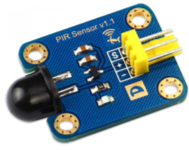
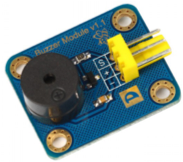
一些常用传感器和输出列表






我们使用的#Blokies design作为建筑材料。#Blokies Pieces是一种纸板设计,
学生可以轻松定制和构建自己的结构。